Ordi : Première mise en route
Vous venez de vous ruiner en achetant des cartes que vous pensiez plug and play, et pas de bol, tout étalé sur la
table ça marche pas…
OK, on va reprendre doucement.
tout d'abord
En général, les problèmes rencontrés viennent d'incompatiblités, de bizzareries linux, etc. Il convient donc, pour commencer, de partir sur une config simple telle que décrite sur mon site. On s'est par exemple aperçu que les disques USB ne sont pas compatibles avec la config par défaut de l'UART, et du coup l'automaintien de l'alim ne fonctionne pas. Ce genre de soucis, un peu tordu, est difficile à résoudre.Le plus simple est donc :
- faire les étapes de ce manuel les unes après les autres
- faire les modifications de la config de base sans sauter d'étape, et en vérifiant le plus souvent possible que ça ne casse rien.
vérification du materiel
Vous avez sous les yeux :
- un raspberry pi avec connecteur B (40 points)
- une carte micro-SD avec l'image préparée à peut près correctement selon mon document ci-dessous.
- une carte acquisition
- un écran ou bien un ordinateur équipé de VNC
- quelques bouts de fils pour brancher les cartes entres elles
liste des documents
évidement vous avez lu tous mes documents utiles, et même mes docs inutiles
- Installation de la carte SD
- Mise à jour et paramétrage de l'application
- Installation de la mezzanine
- Spec de la carte acquisition
- Protocole de communication de la carte acquisition
Branchement de la carte mezzanine
Le raspberry Pi demarre alimenté en USB (5V)
- Si non, je ne peux rien faire pour vous !
 Cabler un bouton entre l’entrée +12V_IN et une entrée PowerON , ainsi qu'un cordon
d'alimentation entre GND et +12V_IN. Si possible, alimenter le Pi via une alim 12V
limitée à 600mA pour ne pas tuer les fusibles en cas d’erreur de manipulation.
Cabler un bouton entre l’entrée +12V_IN et une entrée PowerON , ainsi qu'un cordon
d'alimentation entre GND et +12V_IN. Si possible, alimenter le Pi via une alim 12V
limitée à 600mA pour ne pas tuer les fusibles en cas d’erreur de manipulation.
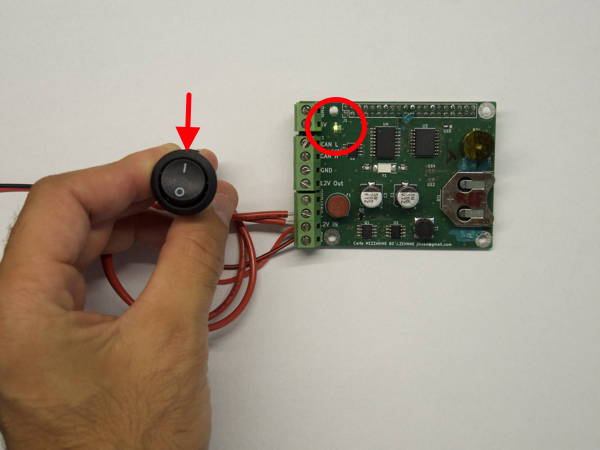 Alimenter. Tant que le bouton est sur 1, la LED doit être allumée.
Alimenter. Tant que le bouton est sur 1, la LED doit être allumée.
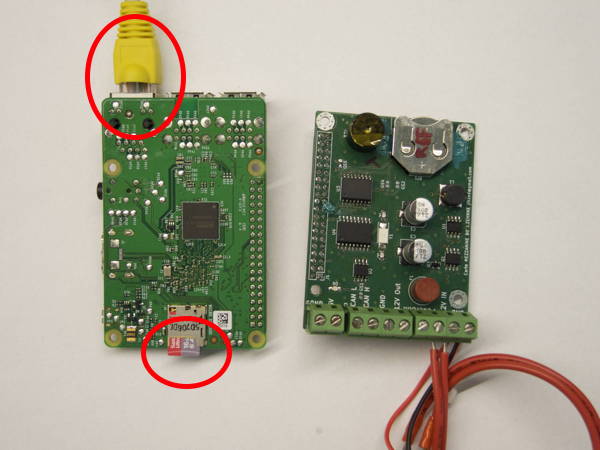 Préparer le Pi avec la carte SD et un écran ou une connexion VNC. Brancher le Pi sur la carte Mezzanine.
Préparer le Pi avec la carte SD et un écran ou une connexion VNC. Brancher le Pi sur la carte Mezzanine.
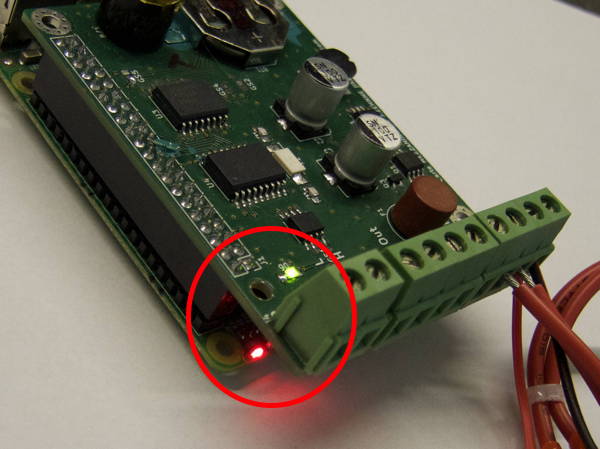 Appuyer sur le bouton pendant environ 5 secondes puis relacher. Lorsque vous appuyez, le pi doit démarrer
et la LED rouge s'allumer.
Appuyer sur le bouton pendant environ 5 secondes puis relacher. Lorsque vous appuyez, le pi doit démarrer
et la LED rouge s'allumer.
- Si non, vérifier les branchements comme dans la doc qui va bien (le 12V, la masse, et le bouton 12V pour démarrer)
- Si toujours pas contactez-moi
Lorsque vous relachez le bouton, le pi doit rester sous tension
- Sinon, soit vous n’avez pas appliqué 12V pendant assez longtemps (5s suffisent)
- Soit il y un mauvais contact sur le bouton
- l'utilisation d'un disque USB (type disque externe) semble poser problème. Utilisez une carte SD dans le pi, avec la bonne image et tout, pour commencer. Par la suite, vous pourrez configurer l'automaintient sur la 2nd broche possible (voir doc)
- Si toujours pas contactez-moi
 Eteignez avec la commande sudo poweroff ou par le menu. Pour que l’electronique s’etteigne,
il faut relacher le bouton PowerON (si c’est un bouton)
Eteignez avec la commande sudo poweroff ou par le menu. Pour que l’electronique s’etteigne,
il faut relacher le bouton PowerON (si c’est un bouton)
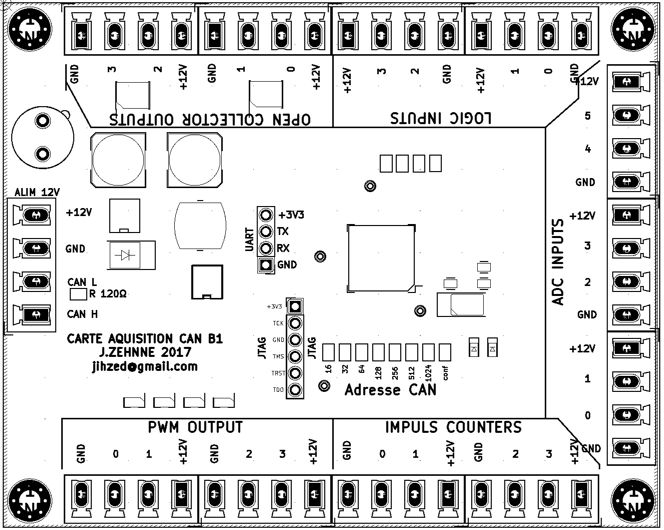
branchement de la carte Acquisition
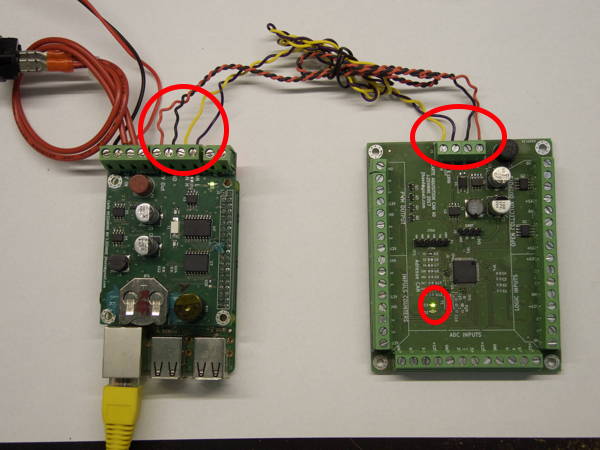 Brancher la carte d'aquisition. Chaque fil doit aller au signal de même nom (facile !).
Alumez le pi, la led doit être clignoter verte à 1Hz.
Brancher la carte d'aquisition. Chaque fil doit aller au signal de même nom (facile !).
Alumez le pi, la led doit être clignoter verte à 1Hz.
- Si le Pi ne démarre plus, vous avez probablement branché à l’envers. Il y a une diode et des fusibles de protection, le fusible peut avoir grillé dans ce cas. Et hop, un fusible à changer.
- Si non, verifier les branchements.
- Si toujours pas contactez-moi
OK, à ce stade, le Pi reste allumé, la mezzanine est allumée et la carte acquisition aussi (et elle clignote vert à 1Hz)
Bus CAN
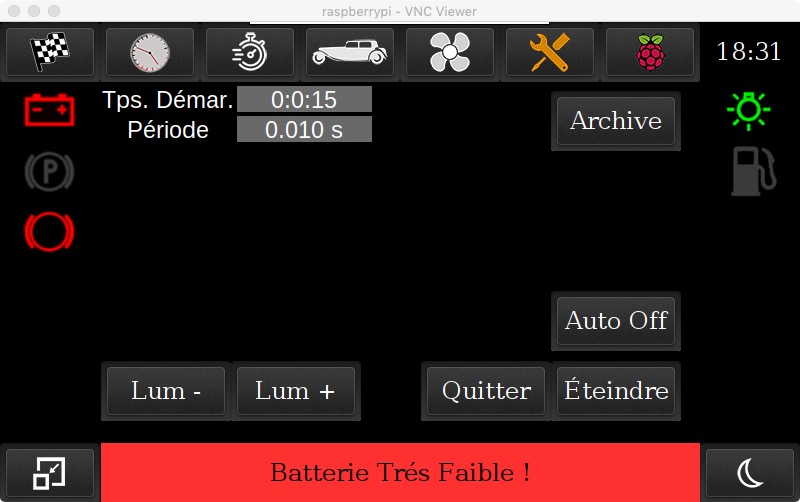 Si l'appli est installée, elle doit se lancer au démarrage. Sinon lancez à la main
(python3 main.py). Dans l'onglet "Raspberry", le temps doit compter.
Si l'appli est installée, elle doit se lancer au démarrage. Sinon lancez à la main
(python3 main.py). Dans l'onglet "Raspberry", le temps doit compter.
- Si l'appli ne démarre pas, Assurez-vous d’avoir une goutte de soudure fermée entre les écritures CANH et CANL sur une des cartes au moins. Si non, fermez-en une avec un fer à souder d'électronicien. En général, je ferme celle sur la mezzanine avant de les envoyer.
Voila, l'ordinateur est maintenant prêt pour être configuré
Debug BUS CAN
Cette section n'est utilie que si l'appli ne démarre pas. Sinon, passez à la suite un peu plus bas.
Démarrez.
Ouvrez 2 terminaux linux.
Dans l'un tapez sudo /sbin/ip link set can0 up type can bitrate 1000000
puis candump can0
Dans l’autre tapez cansend can0 000#r
Dans le 1er terminal, vous devez voir passer l’ordre et la réponse de la forme :
can0 000 [0] remote request (requête)
can0 000 [8] 01 00 01 01 00 01 01 01 (réponse, elle peut varier mais doit ressembler dans la forme)
- Si carte acquisition a clignoté rapidement vert, c’est que la carte est contente qu’on lui parle.
- Si carte acquisition clignote maintenant rouge, c’est que l’ordre est reçu, mais la carte ne l’a pas compris : le plus probable est un problème de syntaxe dans la trame CAN. Arretez de bidouiller et lisez ce doc protocole de communication ;-)
- Si rien ne se passe (pas de réponse et pas de clignotement rouge de la carte acquisition) votre CAN BUS ne fonctionne pas. Vérifier le cablage, et l’installation, la goutte de soudure sur le shunt etc.
- Si toujours pas contactez-moi
NÉNÉSite 1999-2025 J.Zehnne ![]() Tout ce site et ses composants sont faits sur Mac
[1273]
Tout ce site et ses composants sont faits sur Mac
[1273]