|
| def | __init__ (self, Name, Module, Voie, AngleMax=200, TempsMin=0.0005, TempsMax=0.0025, Frequence=50) |
| | the constructor More...
|
| |
| def | Read (self) |
| | return the current angle More...
|
| |
| def | SetAngle (self, angle) |
| | Set new value of angle. More...
|
| |
| def | __init__ (self, Name, Module, Voie, Frequence=50) |
| | The constructor. More...
|
| |
| def | GetFrequence (self) |
| | renvoie la dernière fréqence. More...
|
| |
| def | On_Off (self, OnOff=False) |
| | allume ou coupe la sortie PWM More...
|
| |
| def | Read (self) |
| | get the last PWM set More...
|
| |
| def | SetFrequence (self, Frequence) |
| | fixe la frequence de la PWM More...
|
| |
| def | SetPWM (self, pwm) |
| | fixe la PWM en % More...
|
| |
| def | Write (self, pwm) |
| | fixe la PWM en 1/10000 More...
|
| |
| def | __init__ (self, Name, Module, Voie) |
| | The constructor. More...
|
| |
| def | Compens (self, a=1, b=0) |
| | entre une valeur de compensation (à supprimer) More...
|
| |
| def | Read (self) |
| | retourne la valeur lue du capteur More...
|
| |
| def | Switch (self) |
| | forcement booleen, pas de parametre (à supprimer) More...
|
| |
| def | Write (self, Val) |
| | ecrit sur une sortie (PWM ou Tout ou Rien) More...
|
| |
Sortie PWM sur carte Acquisition STM32 sur bus CAN
permet utilisation d'un servomoteur type modélisme ;.
- Parameters
-
| Name | (string) : the name |
| Module | (CANModule) : instance of CANModule witche the sensor is plug. see CAN_Modules.py |
| Voie | (int) : the chanel (0 to 3) |
| AngleMax | =200 Max value to be set on ServoMoteur |
| TempsMin | =0.0005 (float) : Min PWM for 0° |
| TempsMax | =0.0025 (float) : Max PWM for AngleMax |
| Frequence | =50 (int) |
- Date
-
- 6.3 18 avril 2021 : reprise de la syntaxe (pas de nouvelle fonction)
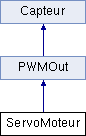
 Public Member Functions inherited from PWMOut
Public Member Functions inherited from PWMOut