Objectif
 Un ordinateur de bord dans une voiture de collection avec un Raspberry Pi 2 B+
pour monitorer le moteur et le comportement de la voiture. L'origine de ce projet, en 2015,
répond à un triple besoin :
Un ordinateur de bord dans une voiture de collection avec un Raspberry Pi 2 B+
pour monitorer le moteur et le comportement de la voiture. L'origine de ce projet, en 2015,
répond à un triple besoin :
- Ajouter quelques fonctions dans la voiture. À la base rien de compliqué mais je ne supportais plus decharger ma batterie parce que j'oubliais mes feux !
- Je voulais essayer les Raspberry Pi, tout le monde en parle, mais qu'est ce que c'est que ce truc ?
- C'est aussi un démonstrateur de mon savoir faire. Un CV en quelques sorte. Ce projet
comporte en effet plusieurs gros morceaux qui sont :
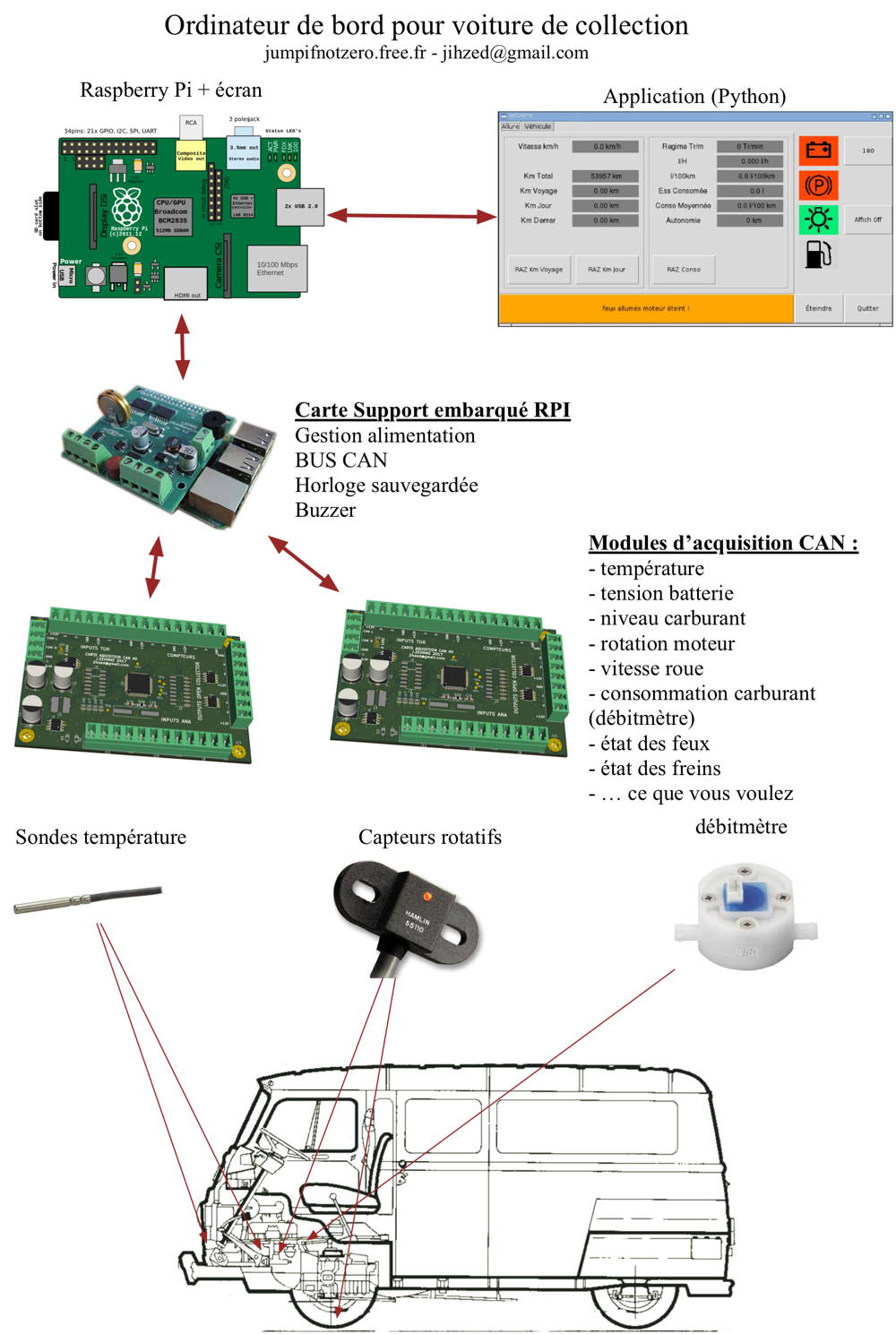
- création de 2 cartes électroniques analogiques et numériques, filtres, alimentation, BUS de communication I2C et CAN.
- Programmation embarqué (STM32) en C sous OpenSTM, programmation débarqué en Python sur le Pi.
- Un peu de Linux
- Tous les à cotés, gestion des capteurs, cablage etc. sont aussi une grosse part.
- Gestion de projet (fabrication des cartes, maitrise des coûts test, vente etc.)
 La plupart des projets utilisants un raspberry pi dans une voiture
se connectent à l'ordi de la voiture pour relire des informations, ou donner des ordres
à l'ordinateur intégré à la voiture. Certains intégrent juste une centrale
multimédia de manière propre.
La plupart des projets utilisants un raspberry pi dans une voiture
se connectent à l'ordi de la voiture pour relire des informations, ou donner des ordres
à l'ordinateur intégré à la voiture. Certains intégrent juste une centrale
multimédia de manière propre.
Dans mon cas, il s'agit de créer un ordinateur qui supervise la voiture. Il s'agit
donc de bien plus qu'un simple ordi communicant sur réseau CAN, il faut aussi de l'électronique
pour l'aquisition des données en temps réel. Il s'agit d'un système complet.
Si vous désirez aussi monitorer votre vieille voiture, un bateau, ou tout autre projet, n'hésitez pas à me contacter. Je propose à la vente des kits qui vont de la simple carte à l'ordi complet en fonction de votre envie de bricoler ou de vos connaissances.
Me suivre sur Facebook.
Un article a été publié sur
Framboise 314, le site de référence pour les fous du Pi en français.
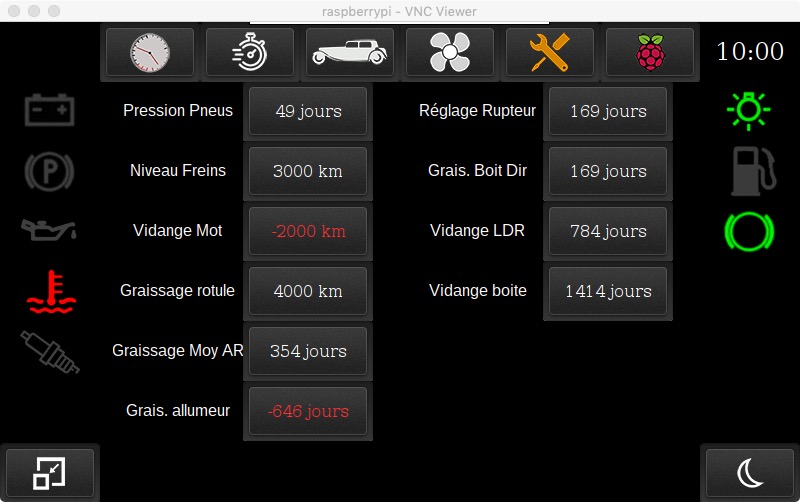 Des alertes entretien en fonction du temps et des km parcours :
Des alertes entretien en fonction du temps et des km parcours :